Principe de pilotage
Asservissement du vecteur vitesse
Du fait de la vulnérabilité du profil aux variations des conditions environnementales, il est n'est pas souhaitable d'utiliser un asservissement de sa trajectoire point par point mais plutôt d'asservir le vecteur vitesse du kite qui se verra imposer des valeurs prédéfinies à quelques points de passage dans la fenêtre de vol.
Exemple : Pilotage grâce à l'écart angulaire \(\gamma\)
Par exemple, il est possible d'utiliser l'écart angulaire \(\gamma\) entre la direction du vecteur vitesse et le méridien du lieu, obtenu en dérivant l'élévation et l'azimut du kite par rapport au temps.
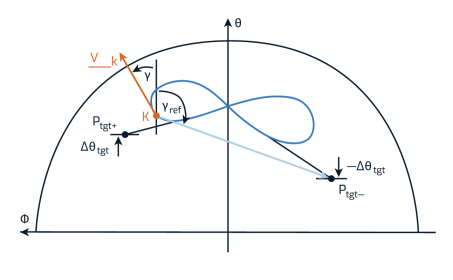
Cet écart est alors comparé à l'écart angulaire entre ce même méridien et la direction d'un point prédéfini, noté Ptgt- dans le schéma ci-dessus, qui constitue la valeur de consigne \(\gamma_{ref}\).
La consigne alternera de Ptgt- à Ptgt+ à des moments prédéfinis de manière à ne jamais interrompre le cycle.
Pilotage plus fiable
Ainsi le pilote donnera l'ordre d'aller en direction du point considéré sans se soucier de la trajectoire réellement suivie par le profil entre les deux points, ce qui rendra le système plus tolérant aux éventuels écarts sans pour autant en compromettre la fiabilité.